Введение. С момента первого применения роботической хирургической системы в 2000 г. робот-ассистированная технология приобрела широкую популярность по всему миру. К настоящему времени робот-ассистированная техника выполнения многих хирургических вмешательств является «золотым» стандартом оперативного лечения заболеваний. Данное утверждение абсолютно справедливо для робот-ассистированной радикальной простатэктомии. Уже в 2007 г. 68% всех подобных вмешательств было выполнено при помощи системы da Vinci, к 2014 г. этот показатель составил уже 85% (по данным компании-производителя). Это стало возможным благодаря общепризнанным преимуществам робот-ассистированной техники выполнения операции, таким как меньшая степень кровопотери, сведение к минимуму необходимости в проведении гемотрансфузии, сравнительно короткий период восстановления и лучшие функциональные результаты.
 Обучение роботической хирургии является сложным комплексным предметом, который требует значимых усилий не только от обучаемого, но и от учителя. Имеют место существенные различия в механизмах обучения открытой или лапароскопической операции и робот-ассистированной техники. Прежде всего это выражается в том, что в первом случае ученик и учитель находятся бок о бок в операционном театре, видя одинаковую картинку операционного поля. При этом учитель может в любой момент остановить выполнение того или иного маневра обучаемым и максимально обеспечить безопасность пациента в период обучения специалиста. Однако данный аспект абсолютно не относится к роботической хирургии. Более того, необходимо принимать во внимание и финансовый аспект. Именно из-за выраженной дороговизны оперативного вмешательства обучаемый не имеет возможности потратить достаточное количество времени, выполняя самостоятельные манипуляции в ходе реального оперативного вмешательства.
Обучение роботической хирургии является сложным комплексным предметом, который требует значимых усилий не только от обучаемого, но и от учителя. Имеют место существенные различия в механизмах обучения открытой или лапароскопической операции и робот-ассистированной техники. Прежде всего это выражается в том, что в первом случае ученик и учитель находятся бок о бок в операционном театре, видя одинаковую картинку операционного поля. При этом учитель может в любой момент остановить выполнение того или иного маневра обучаемым и максимально обеспечить безопасность пациента в период обучения специалиста. Однако данный аспект абсолютно не относится к роботической хирургии. Более того, необходимо принимать во внимание и финансовый аспект. Именно из-за выраженной дороговизны оперативного вмешательства обучаемый не имеет возможности потратить достаточное количество времени, выполняя самостоятельные манипуляции в ходе реального оперативного вмешательства.
Симуляционное обучение получило выраженное развитие в течение последних двух десятилетий благодаря широкому распространению и популяризации лапароскопической и робот-ассистированной хирургической техник. Данный инновационный подход к обучению был валидизирован в качестве обучающего и экзаменационного инструмента и, по данным многочисленных исследований, способен улучшить технику выполнения операций.
Хирургические симуляторы можно разделить на две основные группы: механические симуляторы, с помощью которых хирургические манипуляции выполняются под прямым визуальным контролем в пределах некоего ограниченного пространства, и симуляторы виртуальной реальности, где задачи выполняются в моделированной среде по типу компьютерных игр. Сегодня в эру широкого применения и динамичного развития искусственного компьютерного интеллекта виртуальные симуляторы позволяют обеспечивать максимально реалистичную моделируемую среду для обучаемых. Более того, после завершения каждой манипуляции компьютерные симуляторы способны предоставлять детальный статистический отчет, что чрезвычайно важно для специалиста, проходящего обучение.
 Любой предлагаемый для обучения хирургический симулятор должен пройти детальное тестирование по многим параметрам для определения целесообразности применения устройства в качестве обучающего инструмента. К основным параметрам тестирования относятся внешний вид устройства с оценкой реалистичности симулятора; конструктивное решение – способность симулятора дифференцировать различную степень подготовки хирурга; контекстная валидизация – способность симулятора обучать согласно списку манипуляций, предназначенных для обучения; конкурентоспособность – способность симулятора соответствовать «золотым» стандартам выделенных для подобного рода устройств; предиктивная способность – способность симулятора предсказывать прогресс обучения специалиста. Валидность симуляторов как механического, так и виртуального типа четко определена в отношении лапароскопической техники выполнения оперативных вмешательств. Однако эффективность подобных симуляторов применительно к робот-ассистированной технике до конца не ясна.
Любой предлагаемый для обучения хирургический симулятор должен пройти детальное тестирование по многим параметрам для определения целесообразности применения устройства в качестве обучающего инструмента. К основным параметрам тестирования относятся внешний вид устройства с оценкой реалистичности симулятора; конструктивное решение – способность симулятора дифференцировать различную степень подготовки хирурга; контекстная валидизация – способность симулятора обучать согласно списку манипуляций, предназначенных для обучения; конкурентоспособность – способность симулятора соответствовать «золотым» стандартам выделенных для подобного рода устройств; предиктивная способность – способность симулятора предсказывать прогресс обучения специалиста. Валидность симуляторов как механического, так и виртуального типа четко определена в отношении лапароскопической техники выполнения оперативных вмешательств. Однако эффективность подобных симуляторов применительно к робот-ассистированной технике до конца не ясна.
Нами был проведен систематический обзор для выявления доступных на сегодняшний симуляторов выполнения робот-ассистированных оперативных вмешательств. Мы определили доказательную базу эффективности различных симуляционных платформ в аспектах реалистичности, доступности, воспроизводимости, а также ценовой политики и образовательного ценза.
Материалы и методы. Поиск англоязычных источников литературы был проведен по базам данных Medline и Pubmed с использованием следующих ключевых слов и словосочетаний: «robotics», «robotic surgery», «computer assisted surgery», «simulation», «computer simulation», «virtual reality», «surgical training» и «surgical education». Кроме того, нами была изучена база данных Cochrane и проанализированы архивы абстрактов, представленных на ежегодных конференциях Американской и Европейской ассоциаций урологов. Следует отметить, что поиск отечественных публикаций и/или абстрактов, представленных на ежегодных конференциях Российского общества урологов, по данным ключевым запросам не выявил ни одной работы. Таким образом, данная работа по изучению, сравнению и описанию симуляторов робот-ассистированной хирургии – первая в России. Основной задачей исследования было определить место и тип хирургических симуляторов в программе подготовки отечественных специалистов роботической хирургии.
 В систематический обзор были включены работы, описывающие различные типы хирургических симуляторов, их разработку и валидизацию, а также применение в качестве обучающего инструмента. Были исключены источники с упоминанием и описанием механизма изучения и обучения «нетехническим навыкам».
В систематический обзор были включены работы, описывающие различные типы хирургических симуляторов, их разработку и валидизацию, а также применение в качестве обучающего инструмента. Были исключены источники с упоминанием и описанием механизма изучения и обучения «нетехническим навыкам».
Из каждой публикации была выделена информация, включающая коммерческое название симулятора, предлагаемые для выполнения задания, уровень исходной подготовки участников, длительность симуляционного обучения и способ оценки выполненного упражнения. Каждая работа была оценена нами в аспектах возможности симулятора обеспечить выполнение поставленной задачи, возможности применения устройства в рутинной практике, реалистичности, конструктивности решения, контекстной валидности, надежности, а также в ценовых и образовательных аспектах.
Результаты. Всего было выявлено 565 публикаций, отвечающих ключевым словам и словосочетаниям. После анализа абстрактов было исключено 507 работ, после анализа полного текста статей — еще 39 статей. Таким образом, для окончательного анализа отобрано 19 публикаций. Были изучены следующие симуляторы.
Роботический хирургический симулятор (Robotic Surgical Simulator [RoSS])
Было обнаружено 4 статьи, посвященные опыту применения RoSS (рис. 1) в качестве обучающего инструмента работе на хирургической системе da Vinci.
На ежегодном Конгрессе AUA в 2009 г. S. Seixas-Mikelus и соавт. [1] представили работу, в которой приняли участие 30 специалистов (24 опытных хирурга и 6 специалистов без опыта работы, т.е. 77% популяции исследования имели опыт выполнения в среднем 340 оперативных вмешательств на роботической системе в качестве консольного хирурга. Для изучения валидности симулятора специалистам было предложено пройти краткий курс обучения, состоящий из двух модулей: базовая ориентация предмета в пространстве и его перемещение, а также более продвинутый уровень – ориентация в пространстве, прецизионное передвижение и контроль предмета. После выполнения указанных модулей все участники заполнили опросник, в котором указали, что RoSS является весьма реалистичным симулятором, напоминающим реальную консоль хирургической системы. Оценивая джойстики, 84% специалистов нашли данное устройство «очень близким» к настоящим управляющим механизмам системы da Vinci, 90% респондентов схоже оценили движения роботических рук и аналогичную оценку движениям камеры дали 89% хирургов.
В 2010 г. на Международном роботическом симпозиуме те же авторы сообщили о контентной валидности симулятора RoSS [2]. Среди 42 участников данного исследования были 31 опытный специалист и 11 новичков. В последующем опытная группа была разделена на экспертов (17 человек), выполнивших более 150 операций, и специалистов с опытом проведения 1–150 вмешательств (14 хирургов). Экспертная группа обладала суммарным средним опытом выполнения 881 (160–2200) роботической операции. Данная группа оценила задание «контроль клинча инструментов» как хороший и превосходный инструмент для обучения в 71 и 29% случаев соответственно. Все группы хирургов оценили задание «контроль мяча» как хорошее в 78% случаев и как плохое в 22%. Задание «удаление иглы» оценено как превосходное в 27%, как хорошее в 60 и как плохое в 13% случаев. Задание «удержание ткани третьей рукой» оценено 94% респондентов как превосходное и хорошее. Таким образом, симулятор RoSS расценен как полезный инструмент для обучения и тестирования резидентов перед переходом к работе в операционной (88% опрошенных) и как полезный инструмент для оценки технических навыков при сертификации специалистов для работы на хирургической системе (79% специалистов).
 T. Kesavadas и соавт. [3] отметили позитивный эффект тренировок на RoSS на продолжительность выполнения всего оперативного вмешательства на системе da Vinci. Три группы участников выполняли два упражнения на симуляторе: «маневры с мячом» и «прицельное использование иглы». Первая группа (20 человек) была контрольной и не принимала участия в тренировке на симуляторе перед выполнением данных упражнений на реальной хирургической системе. Группа 2 (15 хирургов) обладала возможностью тренироваться на симуляторе в течение 40 мин, а участники третьей группы (11 человек) обладали схожей возможностью, но на реальной системе da Vinci. Было показано, что предварительная тренировка на симуляторе RoSS существенно сокращает время выполнения аналогичных упражнений на da Vinci по сравнению с группой контроля (p=0,002).
T. Kesavadas и соавт. [3] отметили позитивный эффект тренировок на RoSS на продолжительность выполнения всего оперативного вмешательства на системе da Vinci. Три группы участников выполняли два упражнения на симуляторе: «маневры с мячом» и «прицельное использование иглы». Первая группа (20 человек) была контрольной и не принимала участия в тренировке на симуляторе перед выполнением данных упражнений на реальной хирургической системе. Группа 2 (15 хирургов) обладала возможностью тренироваться на симуляторе в течение 40 мин, а участники третьей группы (11 человек) обладали схожей возможностью, но на реальной системе da Vinci. Было показано, что предварительная тренировка на симуляторе RoSS существенно сокращает время выполнения аналогичных упражнений на da Vinci по сравнению с группой контроля (p=0,002).
K. Guru и соавт. [4] изучали пользу от внедрения новой когнитивной программы в интерфейс симулятора RoSS, предназначенного для улучшения распознавания специфических анатомических ориентиров в ходе выполнения оперативного вмешательства на системе da Vinci. Десять специалистов были разделены на две группы по пять человек: группу без тренировки и группу проходивших обучение на RoSS. Было проведено сравнение времени, потраченного на выполнение упражнения, и количества правильных ответов при распознавании специфических анатомических ориентиров в ходе выполнения роботической цистэктомии. Было отмечено преимущество специалистов из группы проходивших обучение на симуляторе RoSS.
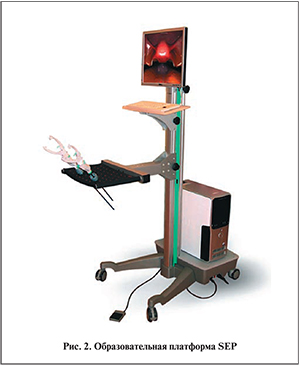
Образовательная платформа Simsurgery (SEP)
Было найдено две публикации, посвященные изучению валидности роботического симулятора SEP (SimSurgery, Норвегия; рис. 2). В исследовании [5] приняли участие 30 хирургов (12 экспертов и 18 новичков) для выполнения двух упражнений на симуляторе SEP. Реалистичность и контекстная валидность симулятора были оценены путем заполнения участниками специфического опросника.
В результате симулятор был расценен как реалистичный и легкий в применении (90% участников), как в целом полезный для обучения (87%) и как полезный для координации работы глаз–рука и для наложения швов (90%). Группе новичков потребовалось больше времени для выполнения упражнений по сравнению с группой экспертов, особенно ярко данное различие было выявлено при выполнении упражнения во время завязывания узлов, падения инструментов, применения чрезмерной силы для затягивания нити и клинча инструментов.
Группа исследователей из Голландии попыталась установить реалистичность и конструктивную валидность SEP [6]. Для установления конструктивной валидности симулятора авторы сравнили работу группы экспертов (более 50 случаев выполнения минимально инвазивных вмешательств) и группы новичков (менее 50 случаев). При этом не было выявлено различия по ряду показателей, включая общую длительность оперативного лечения.
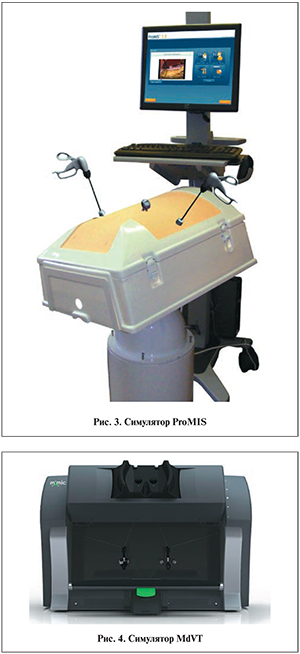
Симулятор ProMIS
Оценке роли симулятора ProMIS («Haptica», Ирландия; рис. 3) в обучении роботической хирургии посвящено три исследования. P. McDonough и соавт. [7] определили реалистичность, контентную и конструктивную валидность симулятора. При этом авторы пригласили в исследование 18 специалистов, разделив их в группы опытных хирургов (8 человек) и новичков (10 хирургов). После стандартного ознакомления с симулятором все участники выполнили три упражнения: «перенос предмета», «прецизионное рассечение» и «наложение интракорпорального узла». Опытная группа превзошла новичков во всех трех упражнениях. Участники оценили симулятор как легкий в использовании, подходящий для обучения роботической технике и приемлемый для тщательной оценки роботических навыков. Эксперты высказали мнение о целесообразности включения симулятора ProMIS в программу обучения роботической хирургии.
В рандомизированном контролируемом исследовании [8] симулятор ProMIS был использован в сочетании со симулятором LapSim (Surgical Science Sweden AB). Целью исследования было обнаружить доказательства полезности применения данных традиционных лапароскопических симуляторов для улучшения технических навыков работы на роботической системе da Vinci. Начинающие хирурги были рандомизированы в группы обучения на одном из симуляторов, на обоих симуляторах или в группу плацебо (не проходили обучение на симуляторах). Оказалось, что улучшению техники выполнения упражнений способствовала и тренировка на симуляторе ProMIS, и работа на обоих симуляторах. Устройство LapSim не продемонстрировало каких-либо достоинств в изучаемом аспекте.
M. Jonsson и соавт. [9] указали на наличие конструктивной валидности системы ProMIS по результатам сравнения работы 5 опытных хирургов и 19 начинающих специалистов. Все участники должны были выполнить 4 задания, предусматривающих необходимость применения базовых лапароскопичсеких навыков. Авторы отметили значимое различие в пользу группы опытных хирургов.
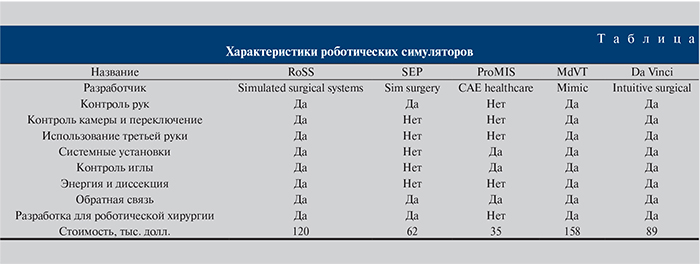
Симулятор Mimic dV-Trainer (MdVT)
Было выявлено семь работ, изучающих эффективность и валидность MdVT (Mimic Technologies, США; рис. 4). Первое исследование было инициировано в 2008 г. [10]. При этом 27 участников были рандомизированы в группы изучения дидактических материалов, виртуальной тренировки и режима сухой лаборатории. Инструкторы не были знакомы с опытом каждого из участников. Участники заполнили опросник до и после выполнения периода обучения. В результате все специалисты пришли к выводу, что роботические системы являются приемлемыми устройствами для выполнения хирургических вмешательств; 87% участников пришли к выводу, что компьютерная симуляция является обоснованной частью обучения роботической хирургии и 93% хирургов посчитали MdVT полезным инструментом. Более опытные специалисты показали лучшее время выполнения заданий по сравнению с новичками.
Годом спустя, в 2009 г., было инициировано еще одно исследование, в котором приняли участие 5 опытных специалистов и 15 новичков, изучавших валидность MdVT [11]. Все исследователи оценили симулятор как «средний» и «легкий» в аспекте применения в процессе обучения и как «выше среднего» и «высокий» во всех аспектах, касающихся реализма симулятора (упражнения, движения рук и камеры). Конструктивная валидность была доказана разницей в показателях выполнения лишь одного из трех предлагаемых упражнений опытными хирургами и новичков.
Kenney и соавт. [12] изучили реалистичность, контентную и конструктивную валидности симулятора. Студенты, резиденты и хирурги были проспективно категоризированы в группы опытных специалистов (7 человек) и новичков (19 хирургов). Каждый исследователь выполнил два упражнения по контролю движений инструментальных рук и два модуля по контролю иглы с последующим заполнением опросника. Группа опытных хирургов преуспела в выполнении каждого из упражнений. Все хирурги данной группы признали симулятор полезным инструмент для обучения и ратовали за включения виртуальной симуляции в программу обучения резидентов. Результатом данного исследования явилось признание реалистичности, контестной и конструктивной валидности симулятора MdVT.
Korets и соавт. [13] также смогли доказать реалистичность и конструктивную валидность симулятора. В исследовании приняли участие 10 резидентов. Каждый исследователь выполнил 15 упражнений из 4 доменов. Участники были распределены в группы опытных хирургов (55–170 случаев) и группу новичков (0–15 случаев). В группе экспертов зарегистрировано меньшее количество случаев клинча инструментов, лучший показатель «исчезновения из поля зрения инструментов» и меньшее количество промахов мимо цели при контроле иглы. Обе группы оценили симулятор как «легкий для применения» и «полезный» при его использовании для обучения роботической хирургии. Участники экспертной группы оценили движения инструментальных рук как реалистичное, тогда как управление иглой не показалось участникам столь реалистичным.
Те же авторы инициировали исследование для подтверждения целесообразности применения симулятора в качестве обучающего инструмента работе на хирургической системе da Vinci. Сравнивали группу, прошедшую обучение на симуляторе MdVT, и группу без виртуального обучения [14]. При этом было использовано ограниченное количество упражнений: контроль движения инструментальных рук, движения камеры, иглы и наложения швов. В результате исследования авторы не нашли каких-либо различий в показателях правильности выполнения упражнений между двумя группами (группа MdVT и группа da Vinci). Таким образом, был сделан вывод об одинаковой пользе MdVT и работе непосредственно на da Vinci без предшествующего симуляционного обучения.
M. Lerner и соавт. [15] изучили эффективность применения симулятора MdVT для улучшения работы на хирургической системе da Vinci. Двенадцать студентов-медиков сначала выполнили на системе da Vinci базовый комплекс упражнений. Затем данная группа четырежды повторила аналогичный комплекс на симуляторе MdVT, после чего вновь вернулась к работе на роботической системе. Результаты данной группы были сравнены с результатами группы резидентов, выполнявших аналогичный базовый набор упражнений на da Vinci. Никто из специалистов группы не обладал опытом роботической хирургии. Показано, что группа студентов улучшила свои показатели после виртуальной тренировки. Однако статистически значимой разницы показателей двух групп выявлено не было.
Симулятор da Vinci
A. Hung и соавт. [16] изучали реалистичность, а также контекстную и конструктивную валидность симулятора da Vinci (рис. 5). Участники были разделены в группу новичков (16 человек) без опыта роботической хирургии, группу среднего опыта (32 хирурга менее 100 случаев) и в опытную группу (15 человек с опытом выполнения более 100 роботических вмешательств). Каждый участник троекратно выполнил 10 упражнений, заполнив в последующем визуальную аналоговую шкалу. Результаты всех трех групп сравнили для изучения конструктивной валидности. Все участники оценили реалистичность симулятора как «очень реалистично». Опытная группа оценила все параметры также «очень реалистично». Более того, все участники посчитали полезным включать тренировки на данном симуляторе в программу обучения резидентов. Опытные хирурги превзошли группу новичков по всем параметрам.
Иные виртуальные симуляторы
Собственный симулятор был разработан в Университете Небраска (Omaha) [17]. Пять студентов выполняли два задания – бимануальный контроль и управление иглой. Каждое управление было выполнено на хирургической системе da Vinci и повторено на собственном симуляторе с последующим заполнением опросника. В результате была установлена статистически значимая разница в показателях выполнения аналогичных упражнений на роботической системе и симуляторе. Мнение участников разделилось, положительное решение о возможности использования данного симулятора в программе обучения роботической хирургии было принято не единогласно.
В ходе еще одного исследования с участием 8 хирургов по изучению данного симулятора [18] не было выявлено каких-либо различий в показателях выполнения аналогичных упражнений на роботической системе и симуляторе.
Обсуждение. Данная работа является первым отечественным систематическим обзором применения виртуальных симуляторов для обучения роботической хирургии. Данные устройства позволяют безопасно улучшать технические навыки обучаемых. Однако современное поколение роботических симуляторов вызывает больше вопросов, чем ответов. Прежде всего ощущается нехватка в стандартизации параметров тестирования различных симуляционных платформ. Прежде всего имеет место недостаточная стандартизация параметров тестирования различных симуляционных платформ. Например, невозможно детально сравнить оценку «очень реалистично» для RoSS и цифровые значения визуальной аналоговой шкалы для симулятора da Vinci. Более того, отсутствуют четкие критерии для разделения специалистов на опытных и новичков. Невозможно провести исследование высокого качества до четкого принятия терминов и параметров сравнения.
К сожалению, большинство из доступных в настоящее время упражнений «генерические» и представляют собой тесты на координацию глаз–рука, манипуляции тканью, диссекции, наложение швов и узлов. Отсутствуют данные, позволяющие определить, какие именно упражнения способствуют улучшению технических навыков, применяемых в реальной практике. В настоящее время разрабатываются упражнения для выполнения сложных маневров и предотвращения развития осложнений.
Еще одним вопросом будущего является разработка специфических упражнений для хирургов с различным уровнем подготовки. Была доказана эффективность применения симуляторов на начальном уровне подготовки специалистов, что не является закономерным для более продвинутых в техническом плане хирургов. J. Davis и соавт. [19] сообщили о высокой эффективности применения виртуальных симуляторов для освоения начальных технических навыков выполнения роботической радикальной простатэктомии, тогда как эффективность в обучении более сложным техническим приемам стремилась к нулю. Учитывая результаты этой работы, а также проведенный нами анализ, считаем, что применение роботических симуляторов абсолютно показано в начале периода обучения роботической хирургии.
В настоящей работе мы использовали критерии, предложенные C. van de Vluten [20] и K. Ahmed и соавт. [21] для оценки качества проведенного исследования. Все симуляторы, за исключением устройства RoSS, продемонстрировали реалистичность, контентную и конструктивную валидность, однако число участников в данных исследованиях, конечно, было недостаточным. Образовательный аспект был продемонстрирован в восьми исследованиях и во всех доступных на рынке симуляторах, за исключением симулятора SEP.
С учетом отсутствия сравнительных исследований невозможно выделить какую-либо симуляционную платформу в качестве ведущей в обучении будущего поколения роботических хирургов. Каждое из устройств предоставляло возможность обучения различным фундаментальным базовым навыкам роботической хирургии (см. таблицу).
Симуляторы MdVT и RoSS имеют схожий, но не аналогичный da Vinci интерфейс, используемый в реальной клинической практике. Симулятор ProMIS сочетает виртуальную и физическую реальность и был применен в лапароскопической практике задолго до появления роботической техники [22, 23]. Исследование [24] обладает максимальным уровнем доказательности среди всех работ по изучению роботических симуляторов. При этом авторы показали, что совместное применение симуляторов ProMIS и LapSim позволяет добиваться максимальной эффективности в улучшении технических навыков роботической хирургии. Интересно, что применение изолированно симулятора LapSim не привело к какому-либо изменению показателей технической подготовленности специалистов. Таким образом, роль данного симулятора остается неясной. Несмотря на высокий уровень валидности платформы SEP, реалистичность данного симулятора остается весьма сомнительной с учетом результатов исследования [6], в котором отзывы участников относительно реалистичности, а также эргономики в целом оказались весьма негативными. Более того, важным недостатком данного симулятора является отсутствие трехмерного изображения – одного из главных и фундаментальных преимуществ роботической системы. Необходимо дальнейшее усовершенствование устройства с целью наделения его необходимыми фундаментальными характеристиками.
Наибольшее количество исследований было посвящено изучению симулятора MdVT, в трех из которых указывалось на реалистичность, а также контентную и конструктивную валидность устройства. Симулятор компании «Intuitive» обладает непревзойденным преимуществом перед всеми платформами – идентичность роботической системе da Vinci, однако нам встретилась лишь одна работа по изучению данного симулятора в качестве обучающего инструмента.
По состоянию на сегодняшний день считаем, что применение виртуальных симуляторов оправданно лишь в начале периода обучения роботической хирургии будущих специалистов. Выбор симулятора не определяет сколько-нибудь значимого различия в эффективности подготовки, однако нельзя не принимать во внимание наличие лишь одного устройства, идентичного хирургической системе da Vinci.
Известно, что в большинстве центров обучения роботической хирургии в Европе и США предпочтение отдается симулятору da Vinci. Данное предпочтение подкрепляется и высокой эргономичностью симулятора – отсутствием дополнительных устройств. Симуляционное обучение идет непосредственно за консолью реальной хирургической системы, к тыльной части которой присоединено тренировочное оборудование.
Заключение. Симуляционное обучение – наиболее перспективный обучающий инструмент, который может быть использован при подготовке следующих поколений роботических хирургов. На сегодняшний день валидизировано применение симуляторов для обучения хирургов. Цена аппаратов служит очевидной преградой для включения в программу обучения роботических хирургов, однако отсутствие данного инструмента приведет к резкому ограничению эффективности и увеличению периода обучения специалистов.
Работа выполнена при поддержке Министерства образования и науки РФ: НШ-5428.2014.7; Российского фонда фундаментальных исследований: НК 13-04-12045; Российского научного фонда: проект № 14-15-01120.